

POINT CLOUD SOFTWARE FOR ALL NEEDS
EVALUATE POINT CLOUDS WITH EASE
The point cloud software Origins:
Evaluate point clouds easily, for architects, engineers, the construction sector, and more.
Capture your environment, quickly evaluate point clouds, and share results.
Point cloud evaluation with PointCab Origins is that simple:
- Fast and intuitive: Create a digital measurement, floor plans and more with just a few clicks - without long training.
- High connectivity: Origins is compatible with almost all laser scanners and CAD & BIM systems.
- Scan2BIM workflow from a single source: From point cloud registration to sharing your data via link - our PointCab solutions make it possible!
ADVANTAGES OF THE POINT CLOUD SOFTWARE
All point clouds, one software
Whether it's drones, terrestrial or SLAM laser scanners – PointCab Origins processes all data.
Of course, merging point cloud data from different scanner is no problem as well.
Of course, merging point cloud data from different scanner is no problem as well.
Intuitive navigation in the point cloud
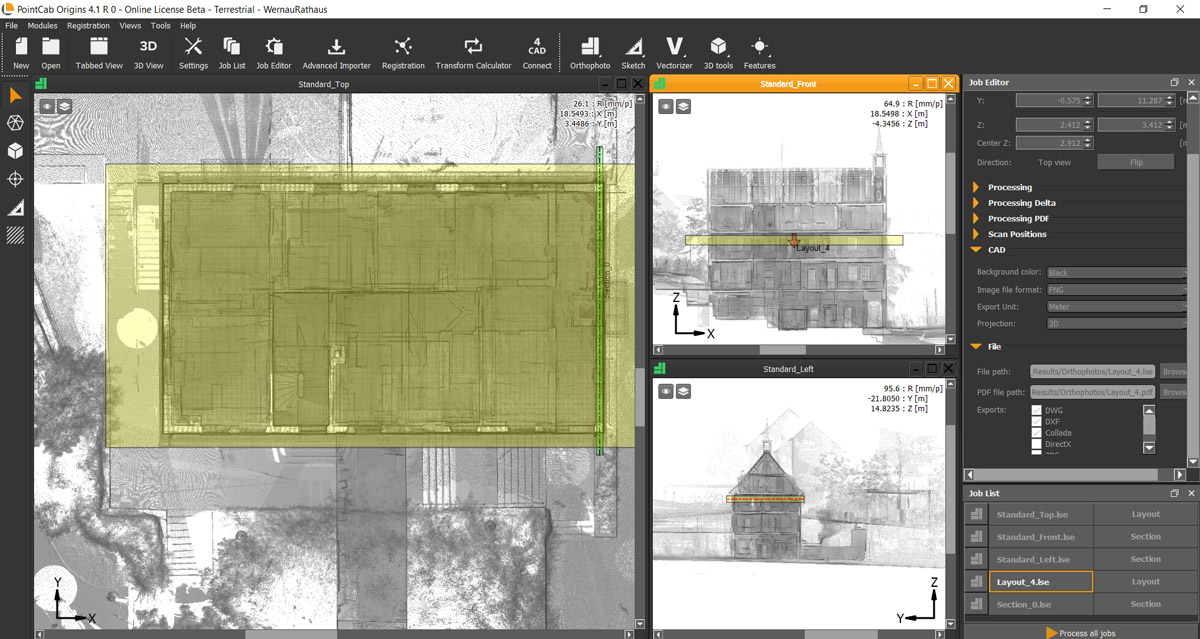
PointCab Origins automatically creates a front, top, and side view of the point cloud. Structures and boundaries are immediately visible.
Measurements can be taken in a quick and easy fashion.
Measurements can be taken in a quick and easy fashion.
Digital measurements in the blink of an eye
Thanks to our orthophotos, you can create floor plans & sections and measure areas, distances, volumes, and much more with just a few clicks. Get your results in record time without losing important 3D information from the point cloud.
Compatible with all CAD systems
Need a 3D model from the point cloud? Piece of cake!
Simply export your Origins results (like floor plans, heights, etc.) to your preferred CAD system.
Instead of exporting the whole point cloud to your CAD system for modelling, you only work with the 3D information you need in the right format (e.g. DWG, DXF and more)
Simply export your Origins results (like floor plans, heights, etc.) to your preferred CAD system.
Instead of exporting the whole point cloud to your CAD system for modelling, you only work with the 3D information you need in the right format (e.g. DWG, DXF and more)
The perfect tool for beginners & professionals
Thanks to the intuitive design of PointCab Origins, newcomers can easily find their way around. The secret lies in the user-friendly orthophoto display.
However, for sophisticated users, Origins offers all the right tools to meet special requirements and use cases.
However, for sophisticated users, Origins offers all the right tools to meet special requirements and use cases.
Previous
Next
WHO IS POINT CLOUD SOFTWARE FOR?
Numerous industries such as architects, surveyors, craftsmanship, and users in the field of heritage protection, construction (as built), and industrial plants have discovered the world of 3D laser scanning.
The advantages are obvious: 3D laser scanning can create a precise digital image of reality – the digital twin. Find out how these industries and users successfully employ PointCab Origins to process their laser scanning data:
FEEDBACK ON POINT CLOUD SOFTWARE ORIGINS
“PointCab Origins is the software that gives you results. It’s the software that gives you the possibility to do things, without worrying how to do them”
Karol Argasinski – CEO BIMfaktoria
POINTCAB ORIGINS 3D OR CORE:
WHICH POINT CLOUD SOFTWARE SUITS MY NEEDS BEST?
From surveyors to architects – everyone deals with different requirements. That’s why we offer you different solutions:
PointCab Origins 3D
THE PERFECT BALANCE Perpetual | Subscription | Rental
- Layouts & Sections
- All Sketch Modules:
Measure Areas, Distances & 3D points,
Pano Views, Profile Lines, Photomatch, Text-Annotations - Align Project
- Merger
- Web Export
- Transformation Calculator
- Vectorizer
- Point Cloud Export
- Mesh
- Volumes
- Space Warp
- Registration
PointCab Origins Core
THE ESSENTIALS Perpetual | Subscription | Rental
- Layouts & Sections
- All Sketch Modules
- Align Project
- Merger
- Web Export
- Transformation Calculator
- Vectorizer
- Point Cloud Export
- Mesh
- Volumes
- Space Warp
- Registration
PointCab Origins 3D
THE PERFECT BALANCE Perpetual | Subscription | Rental
- Layouts & Sections
- All Sketch Modules:
Measure Areas, Distances & 3D points,
Pano Views, Profile Lines, Photomatch, Text-Annotations - Align Project
- Merger
- Web Export
- Transformation Calculator
- Vectorizer
- Point Cloud Export
- Mesh
- Volumes
- Space Warp
- Registration
PointCab Origins Core
THE ESSENTIALS Perpetual | Subscription | Rental
- Layouts & Sections
- All Sketch Modules
- Align Project
- Merger
- Web Export
- Transformation Calculator
- Vectorizer
- Point Cloud Export
- Mesh
- Volumes
- Space Warp
- Registration
BOOST YOUR WORKFLOW!
Take a look at our Plugins to elevate your Scan-to-BIM process and find out more about our cloud solution Nebula!
CAD AND BIM PLUGINS
With our CAD plugins, your Origins results are directly translated into CAD objects in your CAD software.
We provide point cloud plugins for the following software:
NEBULA: EASY SHARING OF POINT CLOUD DATA
With our cloud solution Nebula, you can easily visualize and share your point cloud data. Simply upload your Origins projects to the cloud and your team and partners can conveniently and securely access the data they need from anywhere in the world.
- 3D viewer, pano views and floor plans in the browser
- Take measurements and link documentation in the browser
- Share and visualize projects via link
- Data hosting in the cloud of your choice (local or external)
- Full access control thanks to passwords and more
ORIGINS: FREQUENTLY ASKED QUESTIONS (FAQs)
Answers to frequently asked questions to our point cloud software at a glance.
We offer different software packages and payment models, which can vary depending on the country you live in. You can find an overview in our shop. We are also happy to advise you according to your needs and send you an individual offer. Simply contact our sales team: sales@pointcab-software.com
To be fair to our other customers, partners, and resellers, we, unfortunately, cannot offer a permanent discount. However, there are always special promotions, e.g. for certain trade fairs. We inform about such promotions via our newsletter.
The trial license is valid for 25 working hours and it is limited to 3 projects. This means that the time only expires when PointCab Origins is open and in use. While PointCab Origins is closed, the timer stops.
With our plugins, you can transfer your point cloud data directly into Revit, Autocad, BricsCAD, ZWCAD or Archicad – without any prior export. For all other CAD software, you can find an overview of our data export abilities here.
All common data formats can be read and edited in Origins. You can find an overview here.
There is a small “workaround” for this. To obtain a point cloud from camera images, you can use software solutions such as Agisoft Photoscan, Pix4D, or Sure. You can then read the point cloud calculated by these programs into PointCab Origins.
As a general rule, the better your hardware, the faster PointCab Origins will calculate your jobs. Especially a higher number of cores and RAM have positive effects.
You can find detailed information here.
Want to keep up with the latest pointCab news?
Then follow us on Social Media or subcribe to our newsletter!